This text is a compilation of selected pieces of commonly accepted
mathematics and physics to be referenced in my other texts.
Einstein's
Special Relativity
Left-side equations
(1-4) are conversions for time t, distance l, moving mass m and
momentum p from a stationary frame of A-observer to a moving
frame of B-observer, where corresponding quantities are time t’,
distance l’, moving mass m’ and momentum p’ (which one is stationary, A
or B, is a matter of taste). Right-side equations (1-4) are counter
conversions from B-observer world to A-observer world. Symbol v is the
velocity of the moving observer and c is the speed of light in
equations.
Usually it is not enough to know a simple distance l in relativistic
calculations, but rather we need an exact location with coordinates x,
y, z, t in space-time. Between these variables we have a differential
equation 5, which defines the metric of the Lorentz-world:
Einstein's
General Relativity
Although special relativity includes formulas 3 and 4 to be used with
small masses, it does not include the gravity field: special relativity
assumes space to be massless. However, general relativity takes gravity
into account and therefore also notices masses to exist. General
relativity is defined by Einstein’s equation (equation 6):
There are several different metrics to be used with general relativity.
The original metric Einstein introduced is shown on the differential
equation 7:
What equation 7 tells us is that all the four components of space-time,
x, y, z and t, are to be treated equally manner in calculations. What
is this manner is defined by the metric tensor gab.
To find out Ricci tensor Rab and Ricci scalar R,
we must first derive from a metric tensor gab an
expression of the Riemann curvature tensor Rdabc
(equation 8)
where notation
means Christoffel symbol (equation 10):
Let us write the Riemann curvature tensor as a covariant tensor Rdabc:
Now we get Ricci tensor Rac
and Ricci scalar R:
Riemann
Manifolds
German mathematician
Bernhard Riemann (1826-1866 A.D.) developed a branch of mathematics
called Riemann Geometry, which plants n-dimensional surfaces into the
n+1 dimensional spaces called manifolds. Previously mentioned metric
tensor used with the general relativity, for example, is the core of
Riemann Geometry: metric tensor is the inner product defined on every
point of the manifold and it changes smoothly from point to point.
Metric tensor is always second rank or order i.e. it is a matrix
regardless of the number of dimensions in space. One can derive the
manifold curvature meter, called Riemann curvature tensor, from the
second rank partial derivatives of the metric tensor. There exists
numerous such tensors obeying the Gaussian curvature, but in this text
collection we are only interested in those metric tensors, which form a
single surface into the space and also which have constant curvature.
But still there are several tensors available! For example, three
dimensional space has two surface candidates fulfilling the
requirements, and those are shown on figures 1 and 2:
Fig. 1 The surface of the sphere
is finite and unlimited.
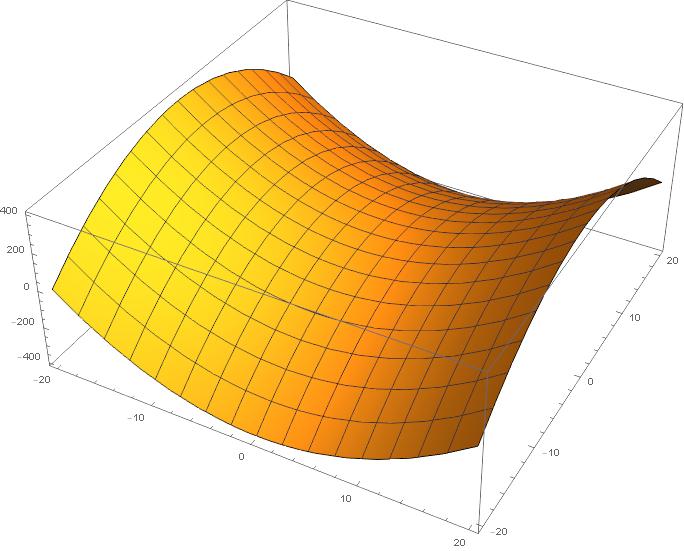
Fig. 2. The surface of the
hyperbolic paraboloid is infinite and unlimited. The surface will
expand infinitely in three dimensions, but you can only see the part of
the surface, which is drawn inside a box on the figure.
But because the principle of unlimited and finite
requires a closed surface, only possible surface is the sphere.
Therefore it is not enough for this text collection that we have a
constant curvature on a single surface, but we are interested in the
situation on the figure 1 only, all the way to the seventh dimension of
the universe.
Analytic
Number Theory
Natural numbers 1, 2, 3, 4, 5, 6, ... divide into two groups: unique
prime numbers and composite numbers. Prime numbers are divisible only
by itself and a number 1, so prime numbers are for example 2, 3, 5, 7,
11, ... There exists infinite many prime numbers. Which ones of the
natural numbers are prime and which doesn't and how primes are
scattered across the composite numbers, that's the contents of analytic
number theory. In practice one study prime numbers on xy-coordinate
system by considering all natural numbers on x-axis while the number of
found primes is the y-coordinate, as you can see here.
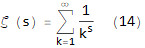
Analytic number theory is based on the Riemann Zeta-function ζ (formula
14):
But the formula 14 is a version of Zeta-function ζ which applies only
if
s > 1, hence it is not suitable for analytic number theory,
because all zero points lie where s < 1. We need those zero
points in this text collection. Fortunately there exists another
version (formula 15) of Riemann Zeta-function covering all real numbers:
The surface of absolute values drawn by function 15 includes both
trivial and nontrivial zero points (as a side note, the
Riemann Hypotheses affecting on nontrivial zero points is still without
a proof though Riemann himself presented it on 1859. However, that
hypotheses does not have practical influence on analytic number
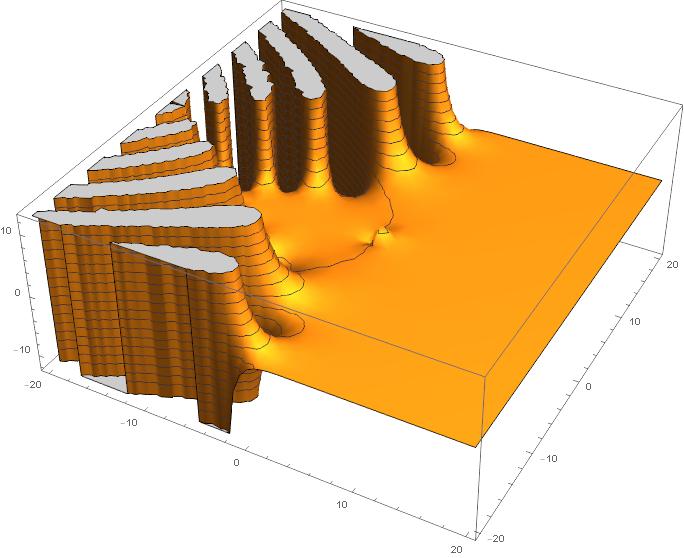
theory). But how look like the graph in complex space drawn by function
15? Because the function 15 is an analytic i.e. complex
function, it has in fact two graphs: complex numbers are actually
number of pairs and both real and imaginary parts draw their own
surface to the complex space. If both of these surfaces penetrate the
zero complex plane at a same point, then the analytic function has a
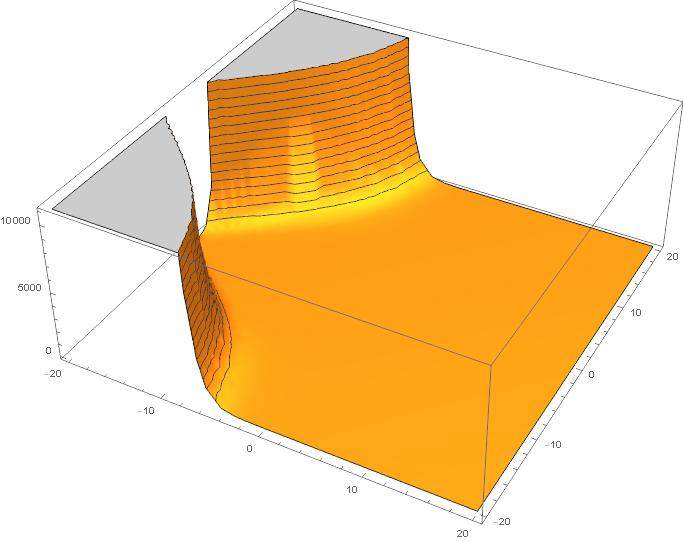
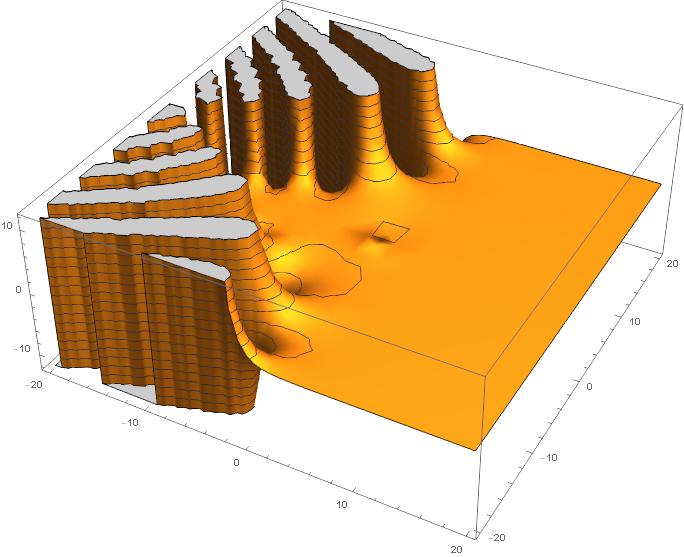
zero point at that point. The surfaces drawn by function 15 are shown
on figures 3, 4 and 5:
Fig. 3. The surface drawn by
absolute values of Riemann Zeta-function.
Fig. 4. The surface drawn by
real values of Riemann Zeta-function.
Fig. 5. The surface drawn by
imaginary values of Riemann Zeta-function.